IEEE trans:单关节助行假肢的实现:对行动障碍患者的膝关节步行辅助
2021-06-27 MedSci原创 MedSci原创

很多患者下肢运动障碍谁需要或可能受益于步行援助。运动障碍的常见原因包括中风、不完全脊髓损伤、多发性硬化症和脑瘫。有运动障碍但仍能行走的个体在此被称为行走能力差的个体。步行能力差的人的腿部运动通常表现为
很多患者下肢运动障碍谁需要或可能受益于步行援助。运动障碍的常见原因包括中风、不完全脊髓损伤、多发性硬化症和脑瘫。有运动障碍但仍能行走的个体在此被称为行走能力差的个体。步行能力差的人的腿部运动通常表现为腿部肌肉无力,也可能表现为痉挛性肌肉张力。这些人常用的辅助设备包括手杖和踝足矫形器(AFOs)。近年来,电动辅助装置(以下简称电动外骨骼)已成为替代或补充传统(被动)辅助装置的一种选择。给定动力外骨骼的设计和控制的性质在很大程度上取决于损伤的性质和将使用它的个人的需要。在这项工作中,作者将重点放在受试者可以受益于单关节辅助的应用上——特别是膝盖处的动力辅助,帮助使用者完成步态周期。

许多应用可能需要与多关节运动相关的单关节辅助。例如,辅助装置可仅在膝关节处使用,但该装置应协调膝关节和腿的其他关节(例如同侧髋关节)之间的运动。本文将这类问题描述为单DOA(sDOA)、多自由度(mDOF)问题。为了将控制器的理想特性转化为sDOA-mDOF系统,作者在此寻求修改用于sDOA-mDOF系统的运动控制方法,并评估该方法在多大程度上为此类应用提供有效控制。
控制器在步态的不同阶段提供三种不同的行为。在摆动阶段,膝关节外骨骼旨在提供运动指导和协助,协调髋关节和膝关节的运动。在早期和中期站姿阶段,外骨骼旨在提供膝盖支撑,而在后期站姿阶段,外骨骼移除膝盖支撑,以允许用户启动摆动阶段。在多自由度配置空间中构造了控制器。控制器是在由髋关节和膝关节角度组成的两自由度配置空间中提出的。控制器需要实时的矢状面大腿角度(相对于垂直方向)和角速度测量、膝盖角度和角速度测量以及脚/地板力检测。受试者在外骨骼行走时可以使用诸如手杖之类的日常辅助设备。试验按以下顺序进行:两次对照行走、四次外骨骼行走和两次额外的对照行走。在这些试验中,用秒表记录步行速度,测量步行30米所用的时间。
为了评估控制器相对于日常使用设备的性能,在膝关节外骨骼上实现了控制器。测试了控制器的膝关节和大腿运动学、用户步行速度和控制器扭矩输出。实验在三名单侧下肢损伤患者身上进行:两名中风偏瘫患者和一名痉挛性截瘫患者。关节外骨骼基本上是一个标准的膝-踝-足矫形器(KAFO),用一个电动膝关节模块代替标准的膝关节。传感包括膝关节驱动盒中测量膝关节角度和角速度的编码器、提供大腿角度和角速度测量的六轴IMU以及位于AFO底部用于地面力测量的FSR。驱动单元包括一个嵌入式系统,该系统运行所有低电平控制,包括无刷电机电流控制,还包括一个CAN接口,通过MATLAB/Simulink提供的实时接口,以500 Hz的采样率从笔记本电脑上实现高电平控制原型和数据采集。
每个受试者的实验在两个疗程中进行,每个疗程在不同的一天进行:第一个疗程用于装配、校准和适应,第二个疗程用于数据收集。在第一个疗程中,每个受试者都被安装到装置上,并熟悉站姿阶段的状态。在第二次试验中,受试者进行了几次试验行走,每次试验包括以自选速度行走50米。试验行走在两种情况下进行:一种没有膝盖外骨骼,但有任何日常使用的辅助设备(以下称为“对照行走”),另一种有膝盖外骨骼(以下称为“外骨骼行走”)。

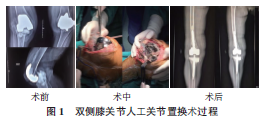
患者佩戴假肢试验
1、2、3号受试者佩戴外骨骼时的步行速度分别为0.95、1.00和0.94m/s;没有外骨骼的速度分别为0.97、1.02和0.95m/s。因此,两种情况下的步行速度实际上是相同的。控制器可以在膝盖角度方向上施加纠正动作,但不能在大腿角度方向上施加纠正动作。受试者1的受影响腿部峰值膝关节角度为64°,无外骨骼为50°。对于受试者2,不带外骨骼的膝关节屈曲角度峰值不太清晰,但估计为26°,而带外骨骼的膝关节屈曲角度峰值为39°(且相当清晰)。对于受试者3,无外骨骼时膝关节角度峰值为47°,有外骨骼时膝关节角度峰值为56°。
![Fig. 7. - Subject affected leg kinematics as measured by the Xsens motion capture system (left and middle column). Subjects 1, 2, and 3 are shown top to bottom, respectively. Red lines indicate trials with the knee exoskeleton; blue lines indicate trials without the exoskeleton. Dashed lines represent state transitions, from left to right: early-stance, late-stance, and swing phase. The numbers in the middle column indicate peak knee flexion values; the black line shows able-bodied control data collected from [28], [29]. The torques applied to the affected leg are shown in the right column. For the torque plots, positive torques indicate flexion; negative torques indicate extension. For all plots, the shaded outline represents ±1 standard deviation from the mean.](https://img.medsci.cn/images/20210616/b3239b24f6e84c4a90c39a165c095485.jpg)
受试者受Xsens运动捕捉系统测量的腿部运动学影响
外骨骼和控制器在三个单侧功能障碍的活动能力差的受试者身上进行了测试。结果表明,假肢能够改善患者摆动阶段和站姿阶段的膝盖运动学。
A. Martínez, C. Durrough and M. Goldfarb, "A Single-Joint Implementation of Flow Control: Knee Joint Walking Assistance for Individuals With Mobility Impairment," in IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 4, pp. 934-942
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言






#TRA#
84
#步行#
85
#假肢#
98