
急性脑损伤患者的机械通气设置
2024-06-04 呼吸机从入门到精通 呼吸机从入门到精通 发表于上海

接受有创机械通气(IMV)的患者研究一致表明,使用肺保护性策略可改善临床结果。
接受有创机械通气(IMV)的患者研究一致表明,使用肺保护性策略可改善临床结果。然而,对于急性脑损伤(ABI;此处定义为缺血性中风、创伤性脑损伤或颅内出血患者)患者,这种策略的安全性和有效性仍存在不确定性。与其他危重病患者相比,脑损伤患者历史上接受了更高的潮气量(Vt)和更低的呼气末正压(PEEP),部分原因是担心较低的 Vt 可能会增加颅内压(ICP)(通过高碳酸血症酸中毒和脑血管扩张),以及较高水平的 PEEP 可能会损害脑灌注压(通过减少心脏静脉回流、心输出量和脑静脉流出)。尽管如此,最近的研究结果支持在大多数 ABI 患者中使用保护性通气策略的安全性。这种策略可以在一系列 ABI 患者中实施,而不会对动脉二氧化碳分压(PaCO2)和 ICP 产生实质性干扰,并有可能改善临床结果[6]。研究还表明,只要维持全身血液动力学状态,较高的 PEEP 可能会改善脑组织氧合。虽然缺乏有力的证据,但现在建议对 ABI 患者进行保护性通气。在这里,我们概述了一种简洁的 IMV 策略,该策略考虑了通气设置、动脉血气目标以及同时患有 ABI 和急性呼吸窘迫综合征(ARDS)的患者的特定方法。通气设置 在选择 IMV 设置时,合理的第一步是将 Vt 设置在预测体重(PBW)的 4 至 8 ml kg−1 之间[3],同时确保平台压(Pplat)≤30 cmH2O。在大多数 ABI 患者中,此范围内的 Vt 被认为是安全的。在 IMV 的受控模式下选择初始呼吸频率应根据第一次血气进行调整,以将 PaCO2 维持在 35 mmHg 至 45 mmHg 之间,如下所述。关于呼吸机模式,常见的做法是使用容量辅助或压力辅助控制来精确管理 Vt 和 PaCO2 在高敏锐度的早期阶段,然后在患者被认为准备好时转换为压力或容量支持模式。然而,可以考虑其他 IMV 模式,并且当前的指南没有做出具体建议。一般来说,ABI 患者应使用与无 ABI 患者相同的 PEEP 水平,尽管应密切监测 ABI 患者 PEEP 对 ICP 和脑灌注压的不良影响。随着 PEEP 增加胸腔内压力,这会导致静脉压回流减少,从而导致心输出量减少。这种现象在低血容量的情况下尤为明显。如果有血管内容量耗竭的证据,建议在增加 PEEP 之前进行液体负荷,以减轻对心输出量和脑灌注压的间接影响。如果在增加 PEEP 的同时注意到 ICP 增加,则应降低后者以将 ICP 维持在目标范围内。最近的数据表明,ABI 患者也可以受益于最小化驱动压力和机械功率的方法,或在特定临床场景中其他个性化目标(即没有 ICP 监测的严重颅内出血),但目前无法制定基于证据的明确指导,并且该领域的前瞻性研究正在进行中(clinicaltrials.gov identifer NCT04459884).
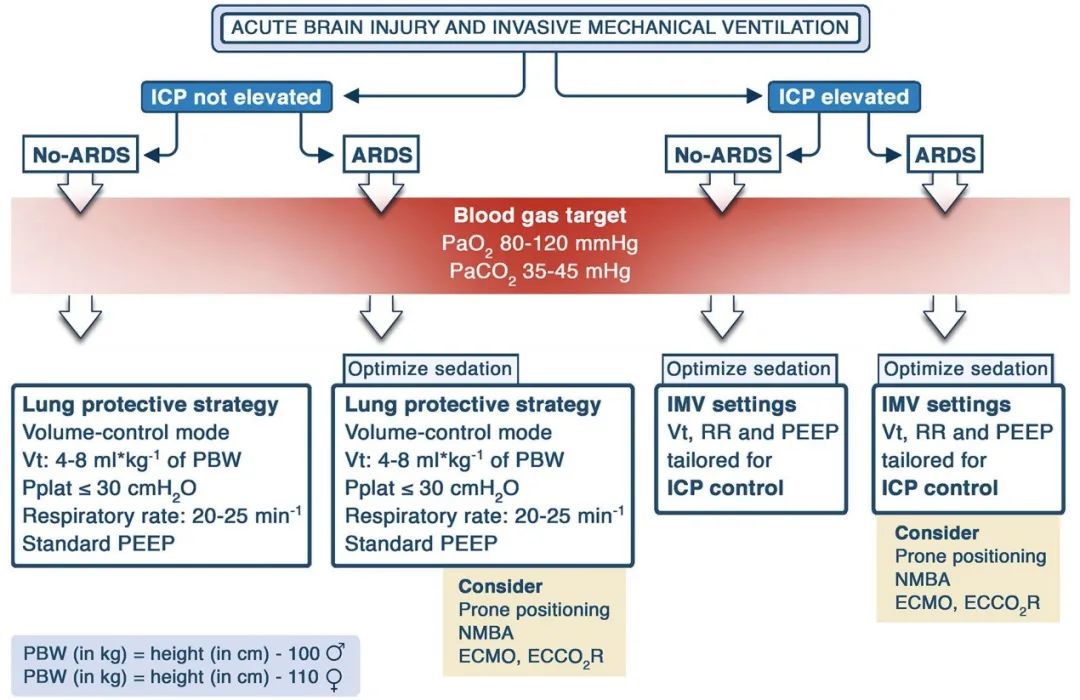
图 1 急性脑损伤患者的有创机械通气。第一步是将潮气量设置在预测体重(PBW)的 4-8 ml kg−1 范围内(图中提供了一个简化公式),使用容量辅助控制模式。一种可能的选择是从 6 ml kg−1 PBW 开始,然后进一步调整 Vt 以维持 Pplat≤30 cmH2O。应考虑至少 5 cmH2O 的标准 PEEP。FiO2 设置为达到 80 mmHg 至 120 mmHg 的 PaO2。目标 PaCO2 应在 35 至 45 mmHg 之间。ARDS 急性呼吸窘迫综合征、ECMO 体外膜氧合、ECCO2R 体外二氧化碳清除、ICP 颅内压、IMV 有创机械通气、PBW 预测体重、PEEP 呼气末正压、Pplat 平台压、NMBA 神经肌肉阻滞剂、RR 呼吸频率、Vt 潮气量
氧气和二氧化碳目标鉴于需要持续的血液动力学监测和重复的血气分析,在所有严重 ABI 患者的早期管理中应考虑使用动脉导管。指南建议将 ABI 患者的动脉氧分压(PaO2)目标定为 80-120 mmHg。最近的一项研究发现,PaO2 超出 92-156 mmHg 范围与较高的住院死亡率相关[11],这表明随着更多数据的可用,最佳 PaO2 目标可能会演变。严格控制 PaCO2 旨在防止因低碳酸血症引起的脑血管收缩或因高碳酸血症引起的脑血管扩张导致的脑缺血。最近对 1476 例 ABI 患者的事后分析发现,严重低碳酸血症或高碳酸血症与住院死亡率增加相关。指南不仅建议将 PaCO2 目标范围定为 35-45 mmHg,而且还支持在脑疝和/或突然 ICP 升高的急性管理中暂时过度通气(低碳酸血症)
同时患有急性脑损伤和急性呼吸窘迫综合征的管理对于同时患有 ABI 和 ARDS 的患者,已经提出了一种逐步方法,该方法考虑了 ABI 和 ARDS 的相对严重程度,并在所有 IMV 决策中整合了脑和心胸生理之间的相互作用。应强烈考虑肺保护性通气;然而,缺乏证据,最新的共识指南无法做出明确建议。镇静的滴定和优化对于有效管理同时患有 ARDS 和 ICP 升高的患者至关重要。该亚组的管理重点是动态的,临床医生的重点可能需要根据动态演变的器官特异性生理学在大脑和肺部之间转移。应考虑多模式神经监测,特别是如果患者昏迷、需要深度镇静或需要更高水平的 PEEP。在严重 ARDS 的情况下,可以根据具体情况讨论俯卧位、使用神经肌肉阻滞剂或体外生命支持等辅助治疗。ABI 患者 IMV 管理的原则总结在图 1 中。
本网站所有内容来源注明为“梅斯医学”或“MedSci原创”的文字、图片和音视频资料,版权均属于梅斯医学所有。非经授权,任何媒体、网站或个人不得转载,授权转载时须注明来源为“梅斯医学”。其它来源的文章系转载文章,或“梅斯号”自媒体发布的文章,仅系出于传递更多信息之目的,本站仅负责审核内容合规,其内容不代表本站立场,本站不负责内容的准确性和版权。如果存在侵权、或不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
在此留言











#机械通气# #急性脑损伤#
76